![]()
РАГС - РОССИЙСКИЙ АРХИВ ГОСУДАРСТВЕННЫХ СТАНДАРТОВ, а также строительных норм и правил (СНиП)
и образцов юридических документов

Произвольная ссылка:
ГОСТ Р 51657.5-2002 Водоучет на гидромелиоративных и водохозяйственных системах. Способ измерения расходов воды с использованием ультразвуковых (акустических) измерителей скорости. Общие технические требования.
ГОСТ Р 51657.5-2002
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Водоучет на гидромелиоративных
и водохозяйственных системах
СПОСОБ ИЗМЕРЕНИЯ РАСХОДОВ ВОДЫ
С ИСПОЛЬЗОВАНИЕМ
УЛЬТРАЗВУКОВЫХ (АКУСТИЧЕСКИХ)
ИЗМЕРИТЕЛЕЙ СКОРОСТИ
Общие технические требования
ГОССТАНДАРТ РОССИИ
Москва
Предисловие
1 РАЗРАБОТАН Техническим комитетом по стандартизации ТК 317 «Измерение расходов жидкости в открытых водотоках и каналах», ВНИИ Гидротехники и мелиорации им. А.Н. Костикова (ГНУ ВНИИГиМ), ВНИИ Расходометрии (ФГУП ВНИИР), НИИ Водоснабжения, канализации, гидротехнических сооружений и инженерной гидрогеологии (НИИ ВОДГЕО), Государственным гидрологическим институтом (ГГИ)
ВНЕСЕН Техническим комитетом по стандартизации ТК 317 «Измерение расходов жидкости в открытых водотоках и каналах» и Департаментом мелиорации земель и сельскохозяйственного водоснабжения Министерства сельского хозяйства РФ
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 4 декабря 2002 г. № 452-ст
3 Настоящий стандарт соответствует основным техническим требованиям ИСО 6416-92
4 ВВЕДЕН ВПЕРВЫЕ
СОДЕРЖАНИЕ
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Водоучет на гидромелиоративных и водохозяйственных системах
СПОСОБ ИЗМЕРЕНИЯ РАСХОДОВ ВОДЫ С ИСПОЛЬЗОВАНИЕМ УЛЬТРАЗВУКОВЫХ (АКУСТИЧЕСКИХ) ИЗМЕРИТЕЛЕЙ СКОРОСТИ
Общие технические требования
Water flow measurement in hydromelioration and water supply systems. Manner of measurement of water discharge using the ultrasonic (acoustic) velocity meters.
General technical requirements
Дата введения 2003-07-01
1 Область применения
Настоящий стандарт устанавливает общие технические требования к способу измерения и условиям применения ультразвуковых (акустических) измерителей скорости с целью измерения расходов воды в открытых водотоках, реках, каналах или закрытых водоводах со свободной поверхностью воды методом «скорость - площадь».
Стандарт распространяется только на способ, в котором измеряют время распространения ультразвуковых колебаний в водном потоке (временные схемы) и не применим к другим способам ультразвукового зондирования, позволяющим измерять скорость водного потока: эффект Доплера, снос ультразвуковых колебаний, частотные схемы и т.д.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ Р 51657.1-2000 Водоучет на гидромелиоративных и водохозяйственных системах. Термины и определения
ГОСТ Р 51657.2-2000 Водоучет на гидромелиоративных и водохозяйственных системах. Методы измерения расхода и объема воды. Классификация
3 Определения
В настоящем стандарте применяют следующие термины с соответствующими определениями:
акустический луч: Зона распространения в жидкой среде механических колебаний акустической частоты от точечного источника. Обычно акустический луч имеет форму конуса, в вершине которого находится источник колебаний. Угол при вершине конуса зависит от частоты акустических колебаний - чем выше частота, тем острее угол конуса (т.е. луч имеет более узкую направленность).
ультразвуковой луч: Разновидность акустического луча с колебаниями ультразвуковой частоты (от 15 кГц и выше).
ультразвуковой импульс: Фиксируемое во времени единичное колебание.
ультразвуковой преобразователь: Датчик, преобразующий электрические или электромагнитные колебания ультразвуковой частоты в механические (источник) и, наоборот, механические колебания ультразвуковой частоты в электрические или электромагнитные (приемник).
ультразвуковая аппаратура: Комплекс приборов, включающий в себя блоки питания, ультразвуковые преобразователи, вторичные приборы для обработки измерительных сигналов, коррекции ошибок измерения и получения результатов измерения.
Остальные термины - по ГОСТ Р 51657.1.
4 Способ измерения
4.1 Принцип измерения
4.1.1 В основу метода положен принцип измерения разности времени прохождения ультразвуковыми импульсами базового измерительного участка по направлению движения потока и против него. Эту разность при неизменных характеристиках контролируемого потока (температуре, солености, концентрации взвешенных частиц и др.) следует определять средней скоростью движения воды на участке измерения.
4.1.2 Базовый измерительный участок задается в водном потоке между двумя пунктами (точками), в которых располагают соответственно источник и приемник ультразвуковых колебаний. Ультразвуковые колебания распространяются от источника к приемнику в виде «акустического луча».
Проекция вектора скорости потока на направление распространения ультразвукового импульса называется скоростью вдоль акустического луча.
4.1.3 Для достижения максимальной точности в измерении средней скорости потока необходимо, чтобы количество акустических лучей было бы достаточным для полного перекрытия его живого сечения.
4.1.4 Среднюю скорость слоя потока V, м/с, вектор которой составляет угол ср с вектором скорости потока, измеренной вдоль акустического луча Vл, м/с, вычисляют по формуле
V = Vл/cosφ. (1)
4.1.5 Для измерения расхода жидкости в открытом русле необходимо выполнить следующие требования:
а) источник и приемник акустического луча должны располагаться на противоположных берегах русла водотока;
б) угол φ, указанный в 4.1.4, должен составлять 30° - 60° для достижения оптимального соотношения между разрешающей способностью метода, возникающими при этом погрешностями и требуемой мощностью ультразвуковой аппаратуры (таблица А.1).
4.2 Использование ультразвука для определения расхода воды
4.2.1 Общие характеристики
Ультразвуковые измерители позволяют измерять осредненную скорость потока в пределах зоны распространения акустического луча. Поэтому ультразвуковые способы для определения расхода воды следует применять в качестве разновидности метода «скорость - площадь». Технические требования при использовании ультразвуковой аппаратуры для этих целей приведены в 4.4.
4.2.2 Открытые русла
Ультразвуковой способ для определения расходов воды в реках и каналах имеет ряд преимуществ перед другими способами измерения расходов:
а) допускает менее жесткие требования к участку измерения;
б) для градуировки не требует обязательного искусственного задания различных расходов и уровней потока;
в) не требует расположения в движущемся потоке каких-либо механических деталей и устройств, что оставляет свободным русло реки или канала и, следовательно, не мешает судоходству и миграции рыбы;
г) не зависит от подтопления участка измерения из-за искусственных или естественных преград в нижнем бьефе канала или реки.
4.2.3 Измерение расхода воды в пойме
В том случае, когда поток не вмещается в одно русло и имеется существенный расход в обход главного измерительного сечения по обширной пойме, ее следует разделить с помощью небольших строительных работ на ряд проток, в каждой из которых расход измеряют отдельно. Целесообразность разделения поймы устанавливают при проектировании.
4.2.4 Измерение расхода в водоводах замкнутого поперечного сечения Ультразвуковой способ применяют для измерения расхода в водоводах замкнутого поперечного сечения, включая трубопроводы, работающие в безнапорном режиме, коллекторы дренажной и ливневой воды, независимо от гидравлических условий. При этом не требуется сжатия потока и изменения геометрии водовода.
4.3 Схемы расположения датчиков (преобразователей)
4.3.1 Общие сведения
Методика измерения скоростей зависит:
- от количества используемых преобразователей ультразвуковых колебаний (акустических лучей);
- от месторасположения преобразователей;
- от необходимой точности и эксплуатационной надежности измерительных устройств;
- от ресурсов для сохранения измерительных устройств в рабочем состоянии (степени резервирования системы).
В зависимости от степени учета вышеперечисленных факторов применяют различные схемы расположения ультразвуковых датчиков: однолучевые, многолучевые, с пассивными отражателями.
4.3.2 Однолучевые схемы
4.3.2.1 Однолучевая схема включает только одну пару преобразователей, формирующую один акустический луч, в пределах которого определяют среднюю скорость одного участка (слоя) живого сечения потока (например луч АА1 на рисунке 1).
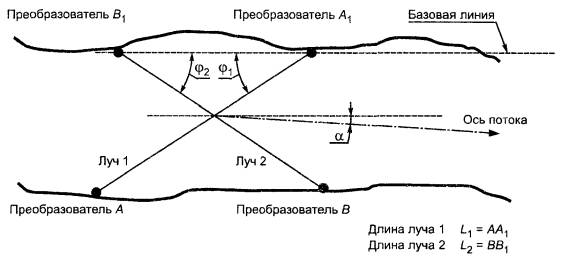
Рисунок 1 - Схема расположения преобразователей с пересекающимися лучами
Такую схему измерения применяют, только когда известна зависимость, связывающая скорость, измеряемую в месте расположения акустического луча, со средней скоростью потока по всей площади его живого сечения (расходное соотношение).
4.3.2.3 Сезонные перемещения преобразователей на другие горизонтали живого сечения возможны при следующем требовании: изменение уровня воды в месте измерений в течение одного сезона должно быть незначительным или медленным, чтобы можно было вовремя изменить высоту расположения преобразователей.
4.3.2.4 Недостатком однолучевой схемы является относительно высокая погрешность измерения и ее невысокая надежность, т.к. в случае отказа одного из преобразователей схема перестает работать.
4.3.3 Многолучевые схемы
4.3.3.1 Многолучевые схемы (с двумя и большим количеством акустических лучей) применяют при частых и значительных изменениях уровня и расхода воды, в том числе и при возникновении подпора со стороны нижнего бьефа, влияющего на расходное соотношение, для получения более точной средней скорости потока по всему его сечению по сравнению с однолучевыми схемами.
4.3.3.2 Требуемое количество акустических лучей при разработке измерительной системы задают, исходя из заданной точности, надежности, стоимости, а также размеров и конфигурации участка измерения.
Измерительная система должна обеспечить определение с заданной точностью профиля скоростей и площади живого сечения потока на участке измерения во всем диапазоне уровней и расходов.
4.3.3.3 Для обеспечения безотказной работы предусматривают дополнительное количество «избыточных» акустических лучей, чтобы пропадание одного или нескольких лучей из-за отказов или повреждений преобразователей заметно не снижало общую точность измерений.
4.3.3.4 Многолучевые схемы применяют также при сложной геометрической форме поперечного сечения реки или канала.
4.3.4 Схемы с пересекающимися лучами
4.3.4.1 Схемы с пересекающимися лучами применяют, когда невозможно определить с требуемой точностью угол φ (4.1.4).
4.3.4.2 Ошибки в определении угла φ возникают, когда ось потока непараллельна оси канала (или его берегам), например, из-за несимметричной формы сечения русла или косого подхода потока к участку измерения. Для оценки погрешности, возникающей при вычислении расхода в этом случае, следует пользоваться данными таблицы А.1.
4.3.4.3 Для устранения этой погрешности используют схему самокоррекции. Ультразвуковые преобразователи размещают таким образом, чтобы получить одну или несколько пар перекрещивающихся акустических лучей, располагающихся на различных глубинах. Каждая пара лучей в одной плоскости образует симметричный относительно оси русла крест (рисунок 1).
Осреднение двух линейных скоростей в пределах одной пары акустических лучей дает значение, близкое к действительной средней скорости потока на данной глубине. При этом возникающие погрешности в значительной степени компенсируются.
4.3.4.4 При использовании этой схемы следует выполнять следующие технические требования:
- акустические лучи каждой пары должны пересекаться в середине русла, а их преобразователи располагают на противоположных берегах напротив друг друга;
- необходимое количество пар лучей задают с учетом требования повышенной надежности, чтобы сохранить характеристики системы в случае отказов в работе ее отдельных элементов (например, из-за физического повреждения преобразователей).
4.3.4.5 Недостатком приведенной на рисунке 1 схемы измерения является тот факт, что преобразователи расположены на обоих берегах русла, поэтому подходящие к ним кабели должны пересекать его поверху или по дну.
4.3.5 Схемы с отраженными лучами
4.3.5.1 Схема измерения с отраженными лучами позволяет проложить на одном берегу все информационные и питающие кабели ультразвуковой измерительной системы, не пересекая русла. Передающий и приемный преобразователи в этом случае расположены на одном берегу и взаимодействуют через пассивный отражатель, находящийся на противоположной стороне канала (рисунок 2).
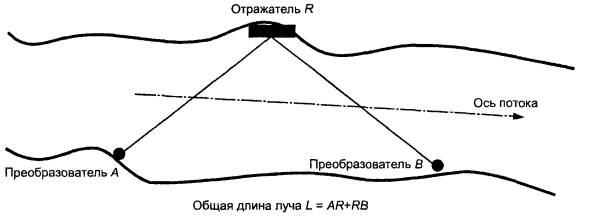
Рисунок 2 - Схема расположения преобразователей с отражением лучей
4.3.5.2 Эту схему применяют для создания акустических лучей большей длины, если это необходимо, чтобы повысить точность измерения.
4.3.5.3 Преимуществом схемы с пассивным отражателем является также то, что на прямом и отраженном участках акустического луча происходит компенсация погрешности, возникающей из-за неточного определения направления оси потока (4.3.4.3).
4.4 Выбор месторасположения аппаратуры
4.4.1 Общие требования к месту измерения
Для обеспечения минимальных погрешностей к участку измерения предъявляют следующие требования:
- неизменность формы поперечного сечения и горизонтальность поперечных профилей дна;
- отсутствие на берегах и дне водной растительности;
- отсутствие в водном потоке зон или слоев с разной плотностью или соленостью;
- отсутствие отражения акустического луча от дна или свободной поверхности;
- идентичность профиля скоростей на всей длине измерительного участка;
- отсутствие в потоке воды аэрации с образованием пузырьков воздуха;
- возможность использования (при необходимости) специальных мер для подавления электрических помех.
4.4.1.1 Геометрия поперечного сечения русла
Русло в пределах участка измерения должно быть прямолинейным с параллельными берегами. Профиль дна от берега до берега должен быть практически горизонтальным. Форма поперечного сечения в зоне измерения вверх и вниз по течению должна оставаться постоянной. Зависимость между глубиной воды и площадью живого сечения должна быть известна и устойчива во времени. Уклон дна в пределах участка измерения должен обеспечивать стабильную эпюру скоростей для каждого установившегося расхода воды.
4.4.1.2 Широкие и мелкие русла могут оказаться непригодными для ультразвуковых измерений. Если глубина воды в канале незначительна по сравнению с размерами самого канала, то акустический луч может отражаться от дна или водной поверхности. На приемный преобразователь в этом случае будут поступать прямой и отраженный сигналы, которые будут накладываться друг на друга, вызывая дополнительную погрешность измерения.
Измерения в мелких руслах возможны, если разность частот прямого и отраженного акустических лучей превышает один период ультразвуковой волны. Это условие будет выполнено, если минимальное заглубление (расстояние от поверхности и дна до ближайшего акустического луча) hmin, м, превышает следующее значение
![]() (2)
(2)
где L - длина акустического луча, м;
C - скорость звука в воде, м/с (таблица А.2);
f - частота ультразвукового преобразователя, Гц.
В таблице А.3 представлены рекомендуемые значения взаимосвязанных параметров рабочих частот ультразвуковых преобразователей, длин акустических лучей, минимальных расстояний между преобразователем и водной поверхностью или дном и возникающих при этом погрешностей измерения скорости (при допущении, что среднее время прохождения ультразвукового импульса определено с точностью не менее 2 % периода волны ±20 нс.
4.4.1.3 Влияние водных растений
Участок измерения должен быть свободным от водных растений, которые сильно ослабляют акустический сигнал из-за его поглощения самими растениями и отражения от размещенных в них пузырьков воздуха.
4.4.1.4 Влияние изменения плотности воды из-за градиентов температуры и солености
При наличии в водном потоке зон или слоев, имеющих разную плотность, обусловленную температурными градиентами или различной соленостью, акустический луч претерпевает преломление и может не достигать приемного преобразователя, что приведет к пропаданию сигнала. Это явление следует учитывать в период солнечного прогрева мелководий в межень и в широких устьях, где проникание соленой воды может вызвать градиенты плотности.
4.4.1.5 Влияние наносов
Присутствие твердых тел, взвешенных в воде, является причиной ослабления (затухания) измерительного сигнала, благодаря эффектам отражения и рассеяния. В местах, где концентрация взвесей больше 1000 мг/л в течение длительного периода или где надежность измерений особенно важна, ультразвуковой метод не пригоден.
4.4.1.6 Влияние профиля скоростей потока
Для эффективного применения способа необходимо, чтобы профили скоростей в различных сечениях измерительного участка имели минимальные отличия.
Изменение профиля скоростей на участке измерения может быть вызвано влиянием на поток конфигурации дна, берегов или впадающих притоков в местах, расположенных на значительном удалении от места измерения вверх по течению. Поэтому следует выбирать измерительный участок на расстоянии не менее чем 50hmax (hmax - наибольшая глубина в канале) от сильных изгибов русла или впадения притоков. Если невозможно найти участок, удовлетворяющий указанным условиям, то следует предусмотреть:
- выбор короткой измерительной зоны;
- использование дополнительных лучей для более точного измерения скоростей по вертикали;
- компенсацию непараллельности потока путем использования схем с пересекающимися лучами.
4.4.1.7 Влияние аэрации потока
Сильная аэрация потока (наличие пузырьков воздуха) может вызвать рассеяние и отражение ультразвуковых волн, что приводит либо к сильным помехам, либо к существенному ослаблению и даже пропаданию измерительного сигнала. Поэтому измерительный участок должен располагаться на несколько километров ниже по течению от возможного места аэрации (например, от водосбросов, перепадов, дамб и плотин).
4.4.1.8 Влияние внешних электрических помех
Ультразвуковая аппаратура содержит в своем составе чувствительные электронные приборы, на работу которых оказывают влияние внешние электрические поля, источники которых (например, мощные радиопередатчики) могут находиться на значительном (десятки километров) расстоянии. В этих случаях при проектировании следует предусматривать специальные меры для борьбы с помехами.
4.4.1.9 Обеспечение градуировки и поверки ультразвуковой аппаратуры
Выбор места расположения ультразвуковых преобразователей проводят с учетом требований предусмотренного проектом способа градуировки и поверки измерительной системы.
4.5 Требования к инженерной съемке места измерения
4.5.1 Общие положения
До начала этапа проектирования должна быть проведена детальная инженерная съемка местности для оценки факторов, влияющих на эффективную работу ультразвуковой системы, перечисленных в 4.4. Она включает в себя: рекогносцировочное обследование, исследование поперечного сечения, измерение профиля скоростей, исследование распространения ультразвукового сигнала и при необходимости другие виды обследования.
4.5.2 Рекогносцировочное обследование
Такое обследование обоих берегов русла на значительном расстоянии вверх и вниз по течению от места предполагаемой установки измерительных преобразователей необходимо выполнить для выявления факторов, способных повлиять на работу системы. Оно должно быть проведено при экстремальных значениях измеряемых расходов, т.е. при паводках и межени.
4.5.3 Исследование поперечного сечения
Поперечное сечение русла подлежит обследованию вверх по течению от предполагаемого места установки преобразователей на расстоянии, в 10 раз превышающем ширину русла, и вниз по течению на расстоянии, в два раза превышающем ширину русла.
4.5.3.1 Измерения глубин в поперечных сечениях должны быть выполнены несколько раз, чтобы убедиться в стабильности дна и берегов. Такие измерения нужно провести:
- при экстремально низком расходе;
- сразу после паводка, подпора или значительного повышения уровня после прилива;
- во время всех сезонов.
4.5.4 Измерения профиля скоростей
Следует провести детальное измерение скоростей течения на базовом участке измерения, используя для этого, например, гидрометрические вертушки.
4.5.4.1 Должны быть обследованы профили скоростей не менее чем в трех поперечных сечениях, по одному на границах базового участка и одно в его центральной части. Одновременно следует измерить геометрические размеры самих сечений.
4.5.5 Исследование распространения сигнала
Если выбранные места установки преобразователей отвечают предъявляемым требованиям, то следует провести предварительные акустические измерения с использованием портативной акустической аппаратуры для определения условий распространения ультразвука. Аппаратура должна включать наборы преобразователей и необходимых крепежных конструкций для их временной установки в русле, а также вторичные приборы, позволяющие генерировать и наблюдать циклы сигналов частотой от 100 кГц до 1 мГц. Задержка принятого сигнала относительно момента его излучения составляет примерно 70 мс на каждые 100 м длины акустического луча.
4.5.5.1 Оборудование для акустического обследования должно включать, по крайней мере, четыре преобразователя для формирования пары пересекающихся лучей и обеспечивать их вертикальное смещение для измерения скоростей потока на разных глубинах.
4.5.5.2 Акустическое обследование проводят для определения необходимых параметров (амплитуды и частоты) излучаемого сигнала, степени его ослабления и возникающих помех для его приема, а также асимметрии потока (непараллельности оси потока его берегам).
4.5.5.3 Такие измерения должны быть проведены при различных режимах потока. 4.5.6 Другие виды обследования
4.5.6.1 Следует провести измерение температуры воды в режимах течения с низкой скоростью и сильным солнечным прогревом для выявления областей со значительными градиентами температуры.
4.5.6.2 Необходимо провести обследование на содержание взвешенных наносов, особенно в местах, подверженных действию подпоров и приливов. Важно оценить способность подпорно-переменного или приливно-отливного течений насыщать поток взвешенными наносами.
4.5.6.3 В предполагаемом месте установки ультразвуковой аппаратуры необходимо измерить уровень электро- и радиопомех. Частота и амплитуда каждого источника помех, регистрируемых преобразователями, должна быть учтена при проектировании устройств шумоподавления.
4.6 Эксплуатационные требования
4.6.1 Эксплуатационные требования определяются необходимостью обеспечения измерения основных параметров для вычисления расхода воды - средней скорости потока и площади его живого сечения.
Среднюю скорость потока измеряют непосредственно ультразвуковым способом с помощью акустических преобразователей.
Площадь живого сечения определяют как функцию двух параметров:
- глубины воды, измеренной ультразвуковым или другим общепринятым методами;
- геометрической формы поперечного сечения русла, измеренного в результате топографической съемки.
По этим параметрам необходимо установить зависимость основных геометрических размеров живого сечения от глубины и занести эту функцию в вычислительные блоки измерительной системы.
4.6.2 Необходимо периодически проверять положение и ориентацию преобразователей, регулярно контролировать дно русла на участке измерения, не реже одного раза в году и обязательно после любого гидрологического явления (паводка, межени и т.п.). При деформации или изменении отметок дна русла расчетный расход будет содержать ошибку, пропорциональную изменению геометрических размеров поперечного сечения. Этот фактор будет вызывать наибольшую погрешность при малых расходах воды.
4.6.3 Определение площади поперечного сечения русла
4.6.3.1 Определение глубины
Глубину воды в русле измеряют либо самой ультразвуковой аппаратурой, либо с помощью уровнемеров или датчиков давления. Уровень воды измеряют относительно фиксированной базы самого средства измерения. К глубине воды это значение приводят через системную константу, связывающую среднюю отметку дна русла на участке измерения и базу средства измерения. Эту константу следует периодически контролировать, т.к. она зависит от стабильности дна русла. Средняя отметка дна означает средний уровень дна русла в пределах измерительного участка относительно выбранной базы. Это значение следует определять измерением отметок дна измерительного участка не менее чем в 50 точках через равные расстояния по дну.
4.6.3.2 Определение геометрических размеров русла
Проверку геометрических размеров русла необходимо также проводить регулярно. Необходима высокая точность определения расстояния (не хуже 0,1 %), которая достигается обычной топографической съемкой. Требуемая высокая точность в данном случае обусловлена тем, что длина акустического луча, которая зависит от ширины и длины измерительного участка, является базовой константой в выражении определения скорости.
4.7 Расчет расхода и требования к вычислениям
4.7.1 Вычисление линейной скорости по разности времен
Достоинством способа вычисления скорости воды по разности времен прохождения ультразвуковыми импульсами длины луча соответственно по и против потока является его независимость от скорости звука в стоячей воде. Таким образом, точность результата вычислений связана только с точностью измерения разности времен, которая может быть очень высокой у современных электронных приборов.
4.7.1.1 Системы с прямолинейным лучом
Среднюю скорость потока воды в слое акустического луча параллельно оси русла VL, м/с, с помощью системы с прямолинейным лучом и преобразователями на обоих берегах (рисунок 1) вычисляют по упрощенной формуле
 (3)
(3)
где L1 - длина акустического луча АА1, м;
φ1 - угол между средним направлением потока и акустическим лучом, ... °;
t1 - время прохождения ультразвукового импульса от преобразователя А к преобразователю А1, с;
t2 - время прохождения импульса от преобразователя А1 к преобразователю А, с.
4.7.1.2 Системы с отраженным лучом
Среднюю скорость потока воды в слое акустического луча параллельно оси русла VL, м/с, в системе с отраженным лучом и преобразователями на одном берегу (рисунок 2) вычисляют по упрощенной формуле
 (4)
(4)
где L - длина отраженного акустического луча ARB, м;
Ln - проекция отрезка, ограниченного преобразователями, расположенными выше и ниже по течению, на ось (линию) среднего направления потока, м;
t3 - время прохождения импульса от преобразователя А, расположенного выше по течению через отражатель R на противоположном берегу до преобразователя В, расположенного ниже по течению, с;
t4 - время перемещения импульса в обратном направлении, с.
4.7.1.3 Вычисление расхода в однолучевых системах
В системах, где скорость определяется с помощью одного луча, необходимо найти соотношение между измеренной скоростью и средней скоростью в сечении (как указано в 4.3.2.2).
По найденной зависимости и при ее постоянстве расход воды Q, м3/с, вычисляют по формуле
Q = CvVA, (5)
где V - скорость, найденная однолучевым измерением, м/с;
А - площадь поперечного сечения, м2;
Cv - эмпирически определенный коэффициент (скоростной коэффициент).
Значение коэффициента Cv находят в результате измерений полей скоростей при различных расходах и в различные периоды. Он может оставаться постоянным или изменяться дискретно. Поле скоростей измеряют с помощью обычной гидрометрической вертушки или используя ультразвуковую систему, если возможно перемещение преобразователей по глубине.
4.7.2 Последовательность и частота опроса в многолучевой системе, ждущий режим работы Период одного цикла излучения и опроса всех погруженных в поток преобразователей должен быть таким, чтобы измеряемый расход оставался практически постоянным и одновременно достаточным для обработки данных измерений и получения значения расхода. Чтобы не вышли из строя преобразователи, находящиеся в момент измерения выше уровня воды, конструкция системы должна обеспечивать для них ждущий режим работы. Удовлетворительный результат достигается, когда система может выполнять не менее 30 полных циклов опроса всех преобразователей в минуту. При повышенных требованиях к надежности измерительной системы и устранения влияния возможных сбоев при ее работе по различным причинам частота опроса должна быть увеличена.
4.7.3 Вычисление расхода в многолучевых системах
4.7.3.1 Измерение расхода ультразвуковым способом аналогично измерению расхода гидрометрической вертушкой. Однако особенностью ультразвукового способа является то, что области измерения скоростей (послойные отсеки) ориентированы горизонтально и распределены по вертикали.
4.7.3.2 Для вычисления расхода наиболее целесообразными являются способы, при которых суммируются расходы в послойных отсеках. Количество и размеры отсеков (ширина и высота) определяются количеством пар ультразвуковых преобразователей и схемой их расположения на откосах (берегах) русла.
Общий расход Qs, м3/с, вычисляют как сумму послойных расходов Qi, по формуле
![]() (6)
(6)
где n - количество послойных отсеков.
4.7.3.3 При обработке данных допускается применять общеизвестные методы вычисления интеграла - метод прямоугольников и метод трапеций.
В первом случае (рисунок 3) средней скоростью в отсеке считают скорость в плоскости луча, проходящего через этот отсек. Границами отсеков по горизонтали являются линии, расположенные на половине расстояния между соседними преобразователями (лучами) в их общей матрице. Шириной отсека является ширина русла на глубине данного луча. Во втором случае среднюю скорость в отсеке определяют как среднее от двух значений скорости потока в плоскостях лучей, ограничивающих этот отсек. Средней шириной отсека является среднее от двух значений ширины русла на глубине этих лучей.
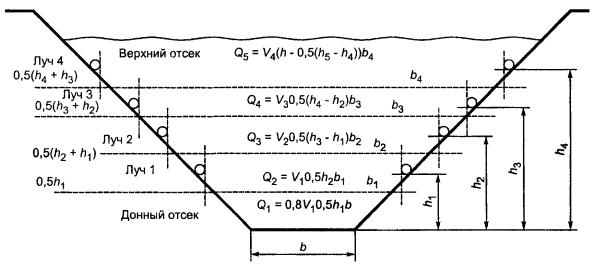
Рисунок 3 - Пример расчета расхода методом послойных сечений
Средняя ширина отсека - это средняя ширина русла, вычисленная как среднее значение от ширины русла в верхнем луче и ширины русла по урезам воды. Последнее значение может быть получено интерполяцией между известными значениями ширины русла в плоскости самого верхнего луча и в плоскости ближайшего к поверхности, но не погруженного в поток преобразователя.
Высотой отсека является разность отметок высот верхнего луча и водной поверхности. Расход через самый нижний отсек, ближайший к дну, вычисляют по такому же принципу.
4.7.3.5 Информация, полученная от луча, находящегося в потоке близко к поверхности, часто бывает недостоверной из-за помех, вызванных поверхностным отражением сигнала. Поэтому в приведенных выше вычислениях ее используют только как информацию о положении самой высокой точки потока для определения ширины русла по урезам воды.
4.7.3.6 При обработке крайних отсеков методом трапеций необходимы определенные условные допущения (4.7.3.4), касающиеся скоростей потока на его поверхности и у дна, так как эти значения необходимы для расчета средней скорости отсека.
4.7.3.7 При небольших размерах донного отсека можно принять следующие допущения для оценки донной и поверхностной скоростей:
- найденную с помощью верхнего луча скорость приравнивают к средней скорости верхнего отсека;
- придонную скорость определяют по значению, найденному в верхнем отсеке и корректируют с помощью коэффициента, найденного эмпирически (например гидрометрической вертушкой).
Обычно этот коэффициент лежит в диапазоне от 0,4 до 0,8.
4.7.4 Вычисление расхода в многолучевых системах при пропадании некоторых лучей
4.7.4.1 При случайном исчезновении отдельных лучей, из-за отказов в работе преобразователей или других элементов аппаратуры, результат измерений расхода должен быть вычислен (точность вычисления в этом случае может быть меньше). Степень уменьшения точности будет зависеть от отношения числа пропавших лучей к числу действующих, а также от их взаиморасположения.
4.7.4.2 При сбое в работе некоторых преобразователей расчет проводят по укрупненным отсекам, которые включают в себя отсеки дефектных преобразователей и которые в этом случае измеряют ближайшими действующими лучами. Алгоритм вычислений должен обеспечить при этом минимальное снижение точности результата измерений.
4.8 Градуировка и поверка измерительной системы
4.8.1 Градуировку измерительной системы следует проводить регулярно и в каждом случае изменения геометрических параметров русла на участке измерения. Градуировка может осуществляться при помощи гидрометрических вертушек или ультразвуковых измерителей скорости.
4.8.2 Однолучевые системы с неподвижными преобразователями
В этом случае необходима градуировка с вычислением средней скорости в створе по измеренному полю скоростей и нахождением коэффициента скорости, который связывает среднюю скорость со скоростью, измеряемой преобразователями (формула 5). Найденный коэффициент скорости в таком случае компенсирует также погрешности, обусловленные неточным определением угла j, под которым направлен луч по отношению к направлению потока, и длины самого луча.
4.8.3 Однолучевые системы с подвижными преобразователями
В результате градуировки в этом случае определяют ту глубину, на которой следует установить подвижные преобразователи, чтобы измеренный с их помощью расход был равен среднему в живом сечении створа. С этой целью необходимо, как и в предыдущем случае, определить поле скоростей с построением эпюры и нахождением глубины, на которой скорость равна средней по сечению. Для нахождения поля скоростей можно использовать гидрометрические вертушки или портативные ультразвуковые или иные аттестованные измерители скорости.
4.8.4 Методика поверки ультразвуковой измерительной системы - по МИ 1759-87 [1]. Погрешности поверок и их результаты - по ПР 50.2.006-94 [2].
4.9 Погрешности измерений
4.9.1 Определение погрешностей измерения и их обозначения - по РМГ 29-99 [3].
4.9.2 Предельную погрешность определения расхода δQ определяют по формуле
![]() (7)
(7)
где δV - предельная относительная погрешность измерения скорости;
δh - предельная относительная погрешность измерения глубины;
δb - предельная относительная погрешность измерения ширины;
δn - погрешность, связанная с ограниченным числом лучей.
Предельную относительную погрешность измерения скорости δV определяют по формуле
 (8)
(8)
где δL и δS - соответственно предельные относительные погрешности измерения длины луча L и его проекции на ось потока S;
δ1 и δ2 - соответственно предельные относительные погрешности измерения интервалов времени t1 и t2;
Все предельные относительные погрешности должны быть оценены при доверительной вероятности 95 %.
4.9.3 Относительные погрешности определения ширины и глубины при тщательном обследовании и соответствующей аппаратуре не превышают 0,1 %. Поэтому при оценке общей погрешности ими можно пренебречь.
4.9.4 Погрешность определения угла между акустическим лучом и береговой линией также около 0,1 % при допущении, что поток параллелен берегу. Однако если поток непараллелен берегам, то эта погрешность существенно увеличивается. В таблице А.1 приведены значения погрешностей в зависимости от измеряемого угла и степени непараллельности оси потока берегам.
4.9.5 В общем случае при использовании ультразвуковой системы с одним акустическим лучом предельная погрешность разового определения расхода от ±5 % до ±10 %. При использовании многолучевых систем предельная погрешность разового определения расхода меньше ±5 %.
ПРИЛОЖЕНИЕ А
(справочное)
Таблицы значений акустических параметров, влияющих на погрешности измерений
Таблица А.1 - Систематические погрешности в измерении скорости потока из-за ошибки на один градус в определении угла φ при различных его значениях
|
Угол φ |
Погрешность определения скорости, %, из-за ошибки на 1° в определении φ |
|
30° |
1 |
|
45° |
2 |
|
60° |
3 |
Таблица А.2 - Скорость звука в воде при различных температурах
|
Скорость звука (приблизительно), м/с |
|
|
0 |
1400 |
|
10 |
1450 |
|
20 |
1485 |
|
30 |
1510 |
|
40 |
1530 |
Таблица A.3 - Погрешности измерения скорости, возникающие из-за ошибки в измерении времени прохождения ультразвуковым импульсом длины луча, при различных длинах луча и рабочих частотах ультразвуковых преобразователей
|
Минимальное расстояние от оси луча до поверхности или дна, м |
Рабочая частота, кГц |
Погрешность измерения скорости, м/с |
|
|
300 |
3,0 - 1,5 |
30 - 100 |
0,005 - 0,0015 |
|
150 |
1,0 - 0,6 |
100 - 300 |
0,003 - 0,0013 |
|
80 |
0,5 - 0,35 |
200 - 500 |
0,003 - 0,002 |
|
30 |
0,3 - 0,15 |
300 - 1000 |
0,006 - 0,003 |
|
10 |
0,12 - 0,07 |
500 - 1500 |
0,013 - 0,007 |
ПРИЛОЖЕНИЕ
Б
(справочное)
Библиография
[3] РМГ 29-99 Государственная система обеспечения единства измерений Метрология. Основные термины и определения
Ключевые слова: недоучет, расходомер, ультразвуковые измерители скорости, расход воды, многолучевые системы